Теоретичні відомості та опис приладу
Під дією зовнішніх сил тіла або змінюють швидкість руху, тобто набувають прискорення (динамічний прояв сил), або деформуються, тобто змінюють свою форму і розміри (статичний прояв сил). Тобто сила є мірою механічної дії на тіло зі сторони інших тіл або полів, в результаті якої тіло набуває прискорення або змінює свою форму і розміри.
Основний закон динаміки поступального руху (другий закон Ньютона) відповідає на запитання, як змінюється механічний рух матеріальної точки (тіла) під дією прикладеної сили: зміна імпульсу тіла за величиною і напрямом дорівнює векторній сумі імпульсів сил, що діють на це тіло:
 , (1)
, (1)
де dt - такий малий проміжок часу, протягом якого всі сили  можна вважати постійними;
можна вважати постійними;  імпульс сили;
імпульс сили;  - імпульс тіла (кількість руху).
- імпульс тіла (кількість руху).
Цей вираз (рівність (1)) - загальне формулювання другого закону Ньютона.
Оскільки маса матеріальної точки (тіла) в класичній механіці є величина постійна, то з формули (1) одержуємо основне рівняння динаміки поступального руху:
 або
або  . (2)
. (2)
 .
.
Основний закон динаміки застосовується до одного тіла. Якщо на матеріальну точку (тіло) діє одночасно декілька сил, то, згідно принципу незалежності дії сил, під  слід розуміти результуючу силу.
слід розуміти результуючу силу.
Основне рівняння динаміки обертового руху тіла навколо закріпленої осі:
 . (3)
. (3)
В лівій частині рівності (3) стоїть векторна сума моментів всіх сил відносно осі обертання. В правій частині: I - момент інерції тіла, що є мірою інертності при обертовому русі відносно даної осі і залежить від розподілу маси тіла відносно цієї осі;  - кутове прискорення - величина, що вимірюється зміною кутової швидкості за одиницю часу.
- кутове прискорення - величина, що вимірюється зміною кутової швидкості за одиницю часу.
Основне рівняння динаміки обертового руху застосовується до одного тіла.
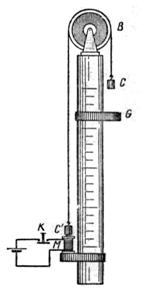 Рис. 1
Рис. 1
Машина Атвуда (рис.1) має вертикальну шкалу з сантиметровими поділками. На верхньому кінці шкали закріплено легкий алюмінієвий блок, що обертається з малим тертям навколо горизонтальної осі. Через блок перекинуто тоненьку нитку з прикріпленими до її кінців вантажами С і С' однакової маси m0 (маса їх відома). Вантаж С' у нижньому положенні утримується електромагнітом M. Якщо на вантаж С покласти додатковий тягарець масою m і виключити струм в обмотці електромагніту, то вся система почне рухатися рівноприскорено. У початковому положенні нижній край вантажу С повинен знаходитись проти нульової позначки шкали. До шкали, за допомогою притискних гвинтів прикріплюється суцільна платформа G.
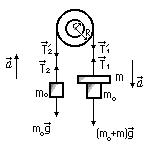
Вважаючи нитку нерозтяжною і невагомою, записуємо динамічні рівняння руху всіх тіл системи (розглядаємо тіло з додатковим тягарцем як одне ціле):
 (4)
(4)
де  - прискорення вантажів; Т2 і Т1 - натяг лівої та правої частин нитки; I- момент інерції блока (відносно його осі); b - кутове прискорення; R - радіус блока; Мтр - момент сили тертя на осі блока, Мтр= Fтрr; r - радіус осі.
- прискорення вантажів; Т2 і Т1 - натяг лівої та правої частин нитки; I- момент інерції блока (відносно його осі); b - кутове прискорення; R - радіус блока; Мтр - момент сили тертя на осі блока, Мтр= Fтрr; r - радіус осі.
Розв`язуючи систему рівнянь (4), враховуючи, що  , одержимо:
, одержимо:
 . (5)
. (5)
Якщо  , то
, то  .
.
Оскільки Мтр - постійна величина, то прискорення системи лінійно залежить від mg. При 
 (6)
(6)
Прискорення знаходимо за формулою шляху рівноприскореного руху без початкової швидкості:
 , (7)
, (7)
де S - відстань від початкового положення нижньої частини вантажу С до суцільної платформи, t - час руху на цьому шляху.
Щоб переконатись у справедливості рівнянь руху, слід визначити прискорення a для різних значень шляху S при різних додаткових тягарцях.